Bianca Homberg
Roboticist at MIT CSAIL in the Distributed Robotics Lab
Roboticist at MIT CSAIL in the Distributed Robotics Lab





Bianca is currently a Masters of Engineering student in the Distributed Robotics Lab at MIT CSAIL. She holds a BS from MIT in Electrical Engineering and Computer Science, and Mathematics. After graduation in January 2016, she will join Google Robotics.
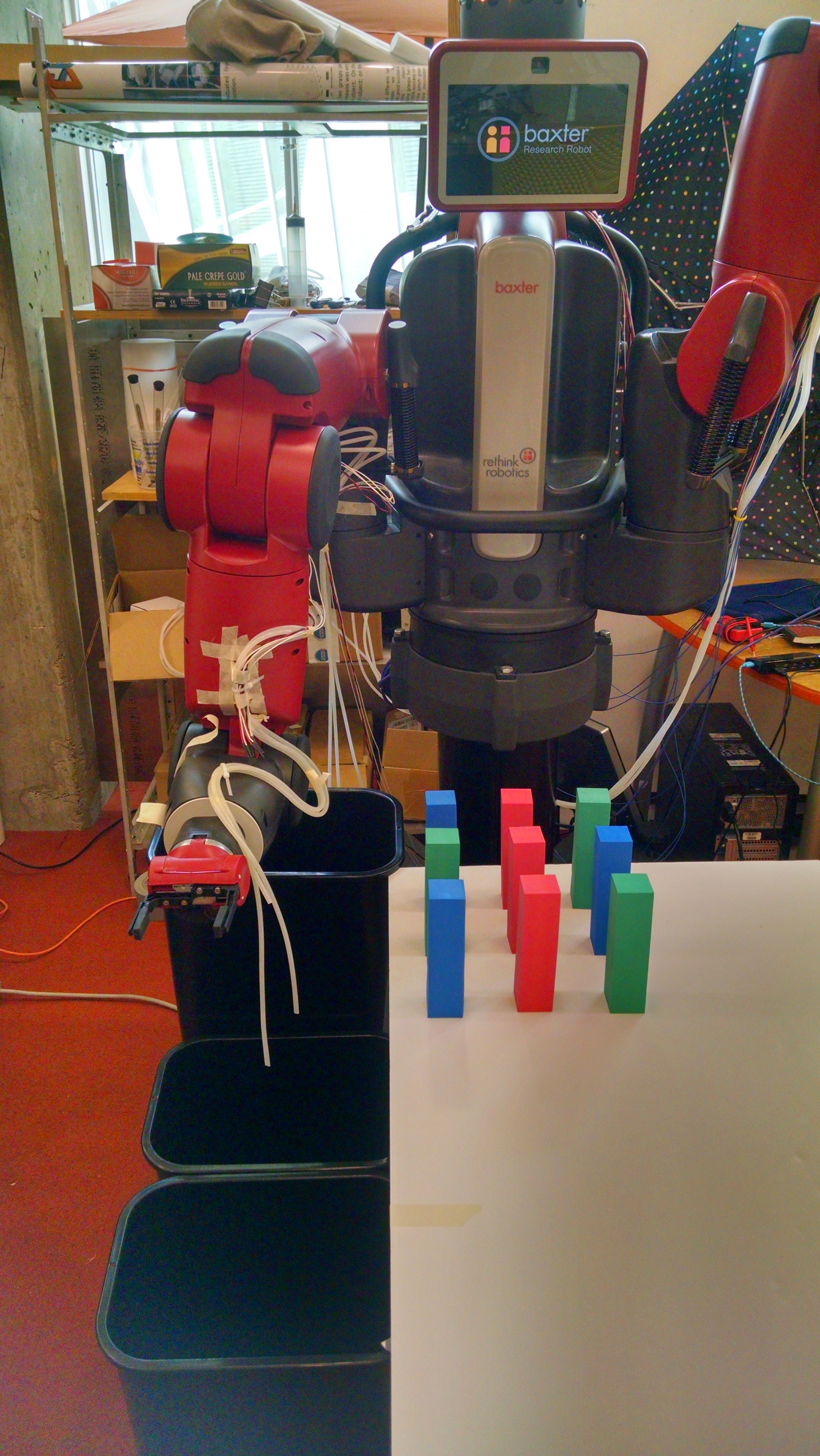
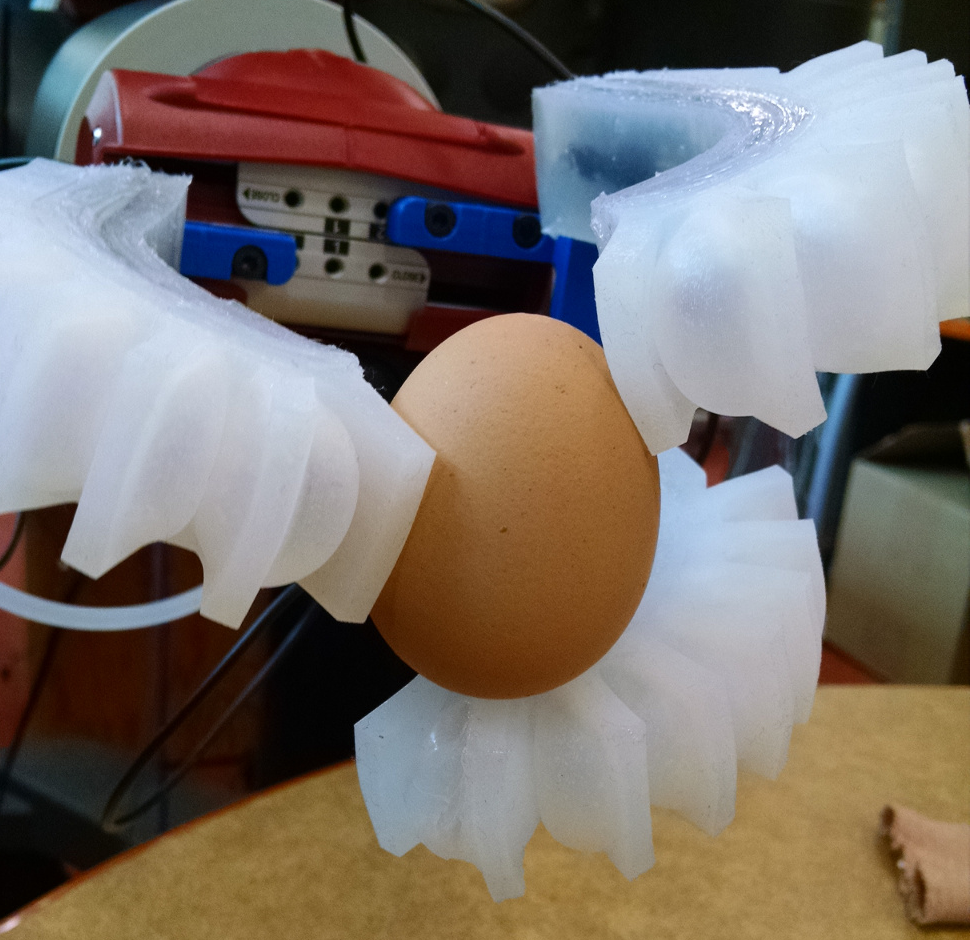
Her thesis work focuses on the development of a modular soft gripper with proprioceptive sensing. The current version of the hand, in addition to being able to pick up a wide variety of objects, has accuracy capable of distinguishing between a set of objects based on the sensor data.



 More details available at
More details available at